libopencm3 STM32 FDCAN More...

Functions | |
| unsigned | fdcan_get_fifo_element_size (uint32_t canport, unsigned fifo_id) |
| Returns actual size of FIFO entry in FIFO for given CAN port and FIFO. More... | |
| unsigned | fdcan_get_txbuf_element_size (uint32_t canport) |
| Returns actual size of transmit entry in transmit queue/FIFO for given CAN port. More... | |
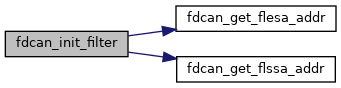
| void | fdcan_init_filter (uint32_t canport, uint8_t std_filt, uint8_t ext_filt) |
| Configure amount of filters and initialize filtering block. More... | |
| int | fdcan_start (uint32_t canport, uint32_t timeout) |
| Enable FDCAN operation after FDCAN block has been set up. More... | |
| void | fdcan_set_fifo_locked_mode (uint32_t canport, bool locked) |
| Configure FDCAN FIFO lock mode. More... | |
| int | fdcan_init (uint32_t canport, uint32_t timeout) |
| Put FDCAN block into INIT mode for setup. More... | |
| void | fdcan_set_can (uint32_t canport, bool auto_retry_disable, bool rx_fifo_locked, bool tx_queue_mode, bool silent, uint32_t n_sjw, uint32_t n_ts1, uint32_t n_ts2, uint32_t n_br_presc) |
| Set essential FDCAN block parameters for plain CAN operation. More... | |
| void | fdcan_set_fdcan (uint32_t canport, bool brs_enable, bool fd_op_enable, uint32_t f_sjw, uint32_t f_ts1, uint32_t f_ts2, uint32_t f_br_presc) |
| Set FDCAN block parameters for FDCAN transmission. More... | |
| void | fdcan_set_test (uint32_t canport, bool testing, bool loopback) |
| Set FDCAN block testing features. More... | |
| int | fdcan_get_init_state (uint32_t canport) |
| Return current FDCAN block operation state. More... | |
| void | fdcan_set_std_filter (uint32_t canport, uint32_t nr, uint8_t id_list_mode, uint32_t id1, uint32_t id2, uint8_t action) |
| Configure filter rule for standard ID frames. More... | |
| void | fdcan_set_ext_filter (uint32_t canport, uint32_t nr, uint8_t id_list_mode, uint32_t id1, uint32_t id2, uint8_t action) |
| Configure filter rule for extended ID frames. More... | |
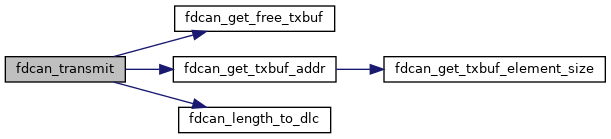
| int | fdcan_transmit (uint32_t canport, uint32_t id, bool ext, bool rtr, bool fdcan_fmt, bool btr_switch, uint8_t length, const uint8_t *data) |
| Transmit Message using FDCAN. More... | |
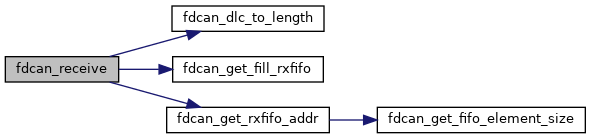
| int | fdcan_receive (uint32_t canport, uint8_t fifo_id, bool release, uint32_t *id, bool *ext, bool *rtr, uint8_t *fmi, uint8_t *length, uint8_t *data, uint16_t *timestamp) |
| Receive Message from FDCAN FIFO. More... | |
| void | fdcan_release_fifo (uint32_t canport, uint8_t fifo_id) |
| Release receive oldest FIFO entry. More... | |
| void | fdcan_enable_irq (uint32_t canport, uint32_t irq) |
| Enable IRQ from FDCAN block. More... | |
| void | fdcan_disable_irq (uint32_t canport, uint32_t irq) |
| Disable IRQ from FDCAN block. More... | |
| bool | fdcan_available_tx (uint32_t canport) |
| Check if there is free transmit buffer. More... | |
| bool | fdcan_available_rx (uint32_t canport, uint8_t fifo) |
| Tell if there is message waiting in receive FIFO. More... | |
Detailed Description
libopencm3 STM32 FDCAN
- Version
- 1.0.0
Devices can have up to three FDCAN peripherals residing in one FDCAN block. The peripherals support both CAN 2.0 A and B standard and Bosch FDCAN standard. FDCAN frame format and bitrate switching is supported. The peripheral has several filters for incoming messages that can be distributed between two FIFOs and three transmit mailboxes. For transmitted messages it is possible to opt for event notification once message is transmitted.
LGPL License Terms libopencm3 License
Function Documentation
◆ fdcan_available_rx()
| bool fdcan_available_rx | ( | uint32_t | canport, |
| uint8_t | fifo | ||
| ) |
Tell if there is message waiting in receive FIFO.
- Parameters
-
[in] canport FDCAN port. See FDCAN block base addresses. [in] fifo Rx FIFO number, 0 or 1
- Returns
- true if there is at least one message waiting in given receive FIFO, false otherwise.
Definition at line 687 of file fdcan_common.c.
References FDCAN_RXFIFO_FL_MASK, FDCAN_RXFIFO_FL_SHIFT, and FDCAN_RXFIS.
◆ fdcan_available_tx()
| bool fdcan_available_tx | ( | uint32_t | canport | ) |
Check if there is free transmit buffer.
- Parameters
-
[in] canport FDCAN port. See FDCAN block base addresses.
- Returns
- true if there is at least one free transmit buffer for new message to be sent, false otherwise.
Definition at line 675 of file fdcan_common.c.
References FDCAN_E_BUSY, and fdcan_get_free_txbuf().

◆ fdcan_disable_irq()
| void fdcan_disable_irq | ( | uint32_t | canport, |
| uint32_t | irq | ||
| ) |
Disable IRQ from FDCAN block.
This routine configures FDCAN to disable certain IRQ. Each FDCAN block supports two IRQs.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] irq number of IRQ to be enabled (currently 0 or 1)
Definition at line 664 of file fdcan_common.c.
References FDCAN_ILE, FDCAN_ILE_INT0, and FDCAN_ILE_INT1.
◆ fdcan_enable_irq()
| void fdcan_enable_irq | ( | uint32_t | canport, |
| uint32_t | irq | ||
| ) |
Enable IRQ from FDCAN block.
This routine configures FDCAN to enable certain IRQ. Each FDCAN block supports two IRQs.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] irq number of IRQ to be enabled (currently 0 or 1)
Definition at line 651 of file fdcan_common.c.
References FDCAN_ILE, FDCAN_ILE_INT0, and FDCAN_ILE_INT1.
◆ fdcan_get_fifo_element_size()
| unsigned fdcan_get_fifo_element_size | ( | uint32_t | canport, |
| unsigned | fifo_id | ||
| ) |
Returns actual size of FIFO entry in FIFO for given CAN port and FIFO.
Obtains value of FIFO entry length. For G4 it returns constant value as G4 has FIFO element length hardcoded.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. Unused. [in] fifo_id ID of FIFO whole length is queried. Unused.
- Returns
- Length of FIFO entry length covering frame header and frame payload.
Definition at line 57 of file fdcan.c.
Referenced by fdcan_get_rxfifo_addr().

◆ fdcan_get_init_state()
| int fdcan_get_init_state | ( | uint32_t | canport | ) |
Return current FDCAN block operation state.
This function effectively returns value of FDCAN_CCCR's INIT bit.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses.
- Returns
- 1 if FDCAN block is in INIT mode, 0 if it is already started.
Definition at line 396 of file fdcan_common.c.
References FDCAN_CCCR, and FDCAN_CCCR_INIT.
◆ fdcan_get_txbuf_element_size()
| unsigned fdcan_get_txbuf_element_size | ( | uint32_t | canport | ) |
Returns actual size of transmit entry in transmit queue/FIFO for given CAN port.
Obtains value of entry length in transmit queue/FIFO. For G4 it returns constant value as G4 has transmit buffer entries of fixed length.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. Unused.
- Returns
- Length of FIFO entry length covering frame header and frame payload.
Definition at line 75 of file fdcan.c.
Referenced by fdcan_get_txbuf_addr().

◆ fdcan_init()
| int fdcan_init | ( | uint32_t | canport, |
| uint32_t | timeout | ||
| ) |
Put FDCAN block into INIT mode for setup.
Initialize the selected CAN peripheral block. This function will switch CAN block into initialization mode. CAN block is then left in initialization mode in order to perform setup, which can't be adjusted once FDCAN block is started. It is mandatory to call at least fdcan_set_can function to configure basic timing values for CAN 2.0 operation. Functions which only have effect, if FDCAN block is in INIT mode are:
You can check if FDCAN block is in INIT mode or it is started using fdcan_get_init_state.
- Parameters
-
[in] canport CAN register base address. See FDCAN block base addresses. [in] timeout Amount of empty busy loops, which routine should wait for FDCAN confirming that it entered INIT mode. If set to 0, function will return immediately.
- Returns
- Operation error status. See FDCAN error return values.
Definition at line 260 of file fdcan_common.c.
References FDCAN_CCCR, FDCAN_CCCR_CCE, fdcan_cccr_init_cfg(), FDCAN_E_OK, and FDCAN_E_TIMEOUT.

◆ fdcan_init_filter()
| void fdcan_init_filter | ( | uint32_t | canport, |
| uint8_t | std_filt, | ||
| uint8_t | ext_filt | ||
| ) |
Configure amount of filters and initialize filtering block.
This function allows to configure global amount of filters present. FDCAN block will only ever check as many filters as this function configures. Function will also clear all filter blocks to zero values. This function can be only called after fdcan_init has already been called and fdcan_start has not been called yet as registers holding filter count are write-protected unless FDCAN block is in INIT mode. It is possible to reconfigure filters (fdcan_set_std_filter and fdcan_set_ext_filter) after FDCAN block has already been started.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] std_filt requested amount of standard ID filter rules (0-28) [in] ext_filt requested amount of extended ID filter rules (0-8)
Definition at line 99 of file fdcan.c.
References fdcan_extended_filter::conf_id1, FDCAN_EFT_MAX_NR, fdcan_get_flesa_addr(), fdcan_get_flssa_addr(), FDCAN_RXGFC, FDCAN_RXGFC_LSE_MASK, FDCAN_RXGFC_LSE_SHIFT, FDCAN_RXGFC_LSS_MASK, FDCAN_RXGFC_LSS_SHIFT, FDCAN_SFT_MAX_NR, fdcan_standard_filter::type_id1_conf_id2, and fdcan_extended_filter::type_id2.
◆ fdcan_receive()
| int fdcan_receive | ( | uint32_t | canport, |
| uint8_t | fifo_id, | ||
| bool | release, | ||
| uint32_t * | id, | ||
| bool * | ext, | ||
| bool * | rtr, | ||
| uint8_t * | fmi, | ||
| uint8_t * | length, | ||
| uint8_t * | data, | ||
| uint16_t * | timestamp | ||
| ) |
Receive Message from FDCAN FIFO.
Reads one message from receive FIFO. Returns message ID, type of ID, message length and message payload. It is mandatory to provide valid pointers to suitably sized buffers for these outputs. Additionally, it is optinally possible to provide non-zero pointer to obtain filter identification, request of transmission flag and message timestamp. If pointers provided for optional outputs are NULL, then no information is returned for given pointer.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses [in] fifo_id FIFO id. [in] release Release the FIFO automatically after copying data out [out] id Returned message ID. Mandatory. [out] ext Returned type of the message ID (true if extended). Mandatory. [out] rtr Returnes flag if request of transmission was requested. Optional. [out] fmi Returned ID of the filter which matched this frame. Optional. [out] length Length of message payload in bytes. Mandatory. [out] data Buffer for storage of message payload data. Mandatory. [out] timestamp Returned timestamp of received frame. Optional.
- Returns
- Operation error status. See FDCAN error return values.
Definition at line 562 of file fdcan_common.c.
References fdcan_rx_fifo_element::data, fdcan_dlc_to_length(), FDCAN_E_NOTAVAIL, FDCAN_E_OK, FDCAN_FIFO_DLC_MASK, FDCAN_FIFO_DLC_SHIFT, FDCAN_FIFO_EID_MASK, FDCAN_FIFO_EID_SHIFT, FDCAN_FIFO_MM_MASK, FDCAN_FIFO_MM_SHIFT, FDCAN_FIFO_RTR, FDCAN_FIFO_RXTS_MASK, FDCAN_FIFO_RXTS_SHIFT, FDCAN_FIFO_SID_MASK, FDCAN_FIFO_SID_SHIFT, FDCAN_FIFO_XTD, fdcan_get_fill_rxfifo(), fdcan_get_rxfifo_addr(), FDCAN_RXFIA, FDCAN_RXFIFO_AI_SHIFT, fdcan_rx_fifo_element::filt_fmt_dlc_ts, and fdcan_rx_fifo_element::identifier_flags.
◆ fdcan_release_fifo()
| void fdcan_release_fifo | ( | uint32_t | canport, |
| uint8_t | fifo_id | ||
| ) |
Release receive oldest FIFO entry.
This function will mask oldest entry in FIFO as released making space for another received frame. This function can be used if fdcan_receive was called using release = false. If used in other case, then messages can get lost.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] fifo_id ID of FIFO where release should be performed (0 or 1)
Definition at line 628 of file fdcan_common.c.
References FDCAN_RXFIA, FDCAN_RXFIFO_AI_SHIFT, FDCAN_RXFIFO_FL_SHIFT, FDCAN_RXFIFO_GI_SHIFT, and FDCAN_RXFIS.
◆ fdcan_set_can()
| void fdcan_set_can | ( | uint32_t | canport, |
| bool | auto_retry_disable, | ||
| bool | rx_fifo_locked, | ||
| bool | tx_queue_mode, | ||
| bool | silent, | ||
| uint32_t | n_sjw, | ||
| uint32_t | n_ts1, | ||
| uint32_t | n_ts2, | ||
| uint32_t | n_br_presc | ||
| ) |
Set essential FDCAN block parameters for plain CAN operation.
Allows configuration of prescalers and essential transmit and FIFO behavior used during transmission in plain CAN 2.0 mode. In this mode FDCAN frame format is not available nor is possible to use fast bitrates. This function does neither enable FD-CAN mode after reset nor disable it after re-entering INIT mode of previously configured block. Timing values set here are valid for both arbitration phase of all frames and for data phase of both CAN and FDCAN frames, which don't use bitrate switching. This function can only be called after FDCAN block has been switched into INIT mode. It is possible to receive FDCAN frames even if FDCAN block is configured only using this function as long as bitrate switching is not used.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] auto_retry_disable Disable automatic frame retransmission on error [in] rx_fifo_locked Enable FIFO locked mode. Upon FIFO overflow all received messages are discarded. [in] tx_queue_mode Enable transmission queue mode. Otherwise transmission works in FIFO mode. [in] silent Enable silent mode. Transmitter stays recessive all the time. [in] n_sjw Resynchronization time quanta jump width [in] n_ts1 Time segment 1 time quanta [in] n_ts2 Time segment 2 time quanta [in] n_br_presc Arbitration phase / CAN mode bitrate prescaler
Definition at line 296 of file fdcan_common.c.
References FDCAN_CCCR, FDCAN_CCCR_DAR, FDCAN_CCCR_MON, FDCAN_NBTP, FDCAN_NBTP_NBRP_SHIFT, FDCAN_NBTP_NSJW_SHIFT, FDCAN_NBTP_NTSEG1_SHIFT, FDCAN_NBTP_NTSEG2_SHIFT, fdcan_set_fifo_locked_mode(), FDCAN_TXBC, and FDCAN_TXBC_TFQM.

◆ fdcan_set_ext_filter()
| void fdcan_set_ext_filter | ( | uint32_t | canport, |
| uint32_t | nr, | ||
| uint8_t | id_list_mode, | ||
| uint32_t | id1, | ||
| uint32_t | id2, | ||
| uint8_t | action | ||
| ) |
Configure filter rule for extended ID frames.
Sets up filter rule for frames having extended ID. Each FDCAN block can have its own set of filtering rules. It is only possible to configure as many filters as was configured previously using fdcan_init_filter.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] nr number of filter to be configured [in] id_list_mode mode in which id1 and id2 are used to match the rule. See Extended ID filter match type. [in] id1 extended ID for matching. Used as exact value, lower bound or bit pattern depending on matching mode selected [in] id2 extended ID or bitmask. Used as exact value, upper bound or bit mask depending on matching mode selected [in] action Action performed if filtering rule matches frame ID. See Extended ID filter action.
Definition at line 458 of file fdcan_common.c.
References fdcan_extended_filter::conf_id1, FDCAN_EFEC_SHIFT, FDCAN_EFID1_MASK, FDCAN_EFID1_SHIFT, FDCAN_EFID2_MASK, FDCAN_EFID2_SHIFT, FDCAN_EFT_SHIFT, fdcan_get_flesa_addr(), and fdcan_extended_filter::type_id2.

◆ fdcan_set_fdcan()
| void fdcan_set_fdcan | ( | uint32_t | canport, |
| bool | brs_enable, | ||
| bool | fd_op_enable, | ||
| uint32_t | f_sjw, | ||
| uint32_t | f_ts1, | ||
| uint32_t | f_ts2, | ||
| uint32_t | f_br_presc | ||
| ) |
Set FDCAN block parameters for FDCAN transmission.
Enables and configures parameters related to FDCAN transmission. This function allows configuration of bitrate switching, FDCAN frame format and fast mode timing. This function can only be called if FDCAN block is in INIT mode. It is safe to call this function on previously configured block in order to enable/disable/change FDCAN mode parameters. Non-FDCAN parameters won't be affected.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] brs_enable Enable FDCAN bitrate switching for fast mode operation [in] fd_op_enable Enable transmission of FDCAN-formatted frames [in] f_sjw Resynchronization time quanta jump width in fast mode [in] f_ts1 Time segment 1 time quanta in fast mode [in] f_ts2 Time segment 2 time quanta in fast mode [in] f_br_presc Fast mode operation bitrate prescaler
Definition at line 343 of file fdcan_common.c.
References FDCAN_CCCR, FDCAN_CCCR_BRSE, FDCAN_CCCR_FDOE, FDCAN_DBTP, FDCAN_DBTP_DBRP_SHIFT, FDCAN_DBTP_DSJW_SHIFT, FDCAN_DBTP_DTSEG1_SHIFT, and FDCAN_DBTP_DTSEG2_SHIFT.
◆ fdcan_set_fifo_locked_mode()
| void fdcan_set_fifo_locked_mode | ( | uint32_t | canport, |
| bool | locked | ||
| ) |
Configure FDCAN FIFO lock mode.
This function allows to choose between locked and overewrite mode of FIFOs. In locked mode, whenever FIFO is full and new frame arrives, which would normally been stored into given FIFO, then frame is dropped. If overwrite mode is active, then most recent message in FIFO is rewritten by frame just received.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] locked true activates locked mode, false activates overwrite mode
Definition at line 177 of file fdcan.c.
References FDCAN_RXGFC, FDCAN_RXGFC_F0OM, and FDCAN_RXGFC_F1OM.
Referenced by fdcan_set_can().

◆ fdcan_set_std_filter()
| void fdcan_set_std_filter | ( | uint32_t | canport, |
| uint32_t | nr, | ||
| uint8_t | id_list_mode, | ||
| uint32_t | id1, | ||
| uint32_t | id2, | ||
| uint8_t | action | ||
| ) |
Configure filter rule for standard ID frames.
Sets up filter rule for frames having standard ID. Each FDCAN block can have its own set of filtering rules. It is only possible to configure as many filters as was configured previously using fdcan_init_filter.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] nr number of filter to be configured [in] id_list_mode Mode in which id1 and id2 are used to match the rule. See Standard ID filter match type. [in] id1 standard ID for matching. Used as exact value, lower bound or bit pattern depending on matching mode selected [in] id2 standard ID or bitmask. Used as exact value, upper bound or bit mask depending on matching mode selected [in] action Action performed if filtering rule matches frame ID. See Standard ID filter action.
Definition at line 418 of file fdcan_common.c.
References fdcan_get_flssa_addr(), FDCAN_SFEC_SHIFT, FDCAN_SFID1_MASK, FDCAN_SFID1_SHIFT, FDCAN_SFID2_MASK, FDCAN_SFID2_SHIFT, FDCAN_SFT_SHIFT, and fdcan_standard_filter::type_id1_conf_id2.

◆ fdcan_set_test()
| void fdcan_set_test | ( | uint32_t | canport, |
| bool | testing, | ||
| bool | loopback | ||
| ) |
Set FDCAN block testing features.
Configures self-test functions of FDCAN block. It is safe to call this function on fully configured interface. This function can only be called after FDCAN block is put into INIT mode.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] testing Enables testing mode of FDCAN block [in] loopback Enables transmission loopback
Definition at line 374 of file fdcan_common.c.
References FDCAN_CCCR, FDCAN_CCCR_TEST, FDCAN_TEST, and FDCAN_TEST_LBCK.
◆ fdcan_start()
| int fdcan_start | ( | uint32_t | canport, |
| uint32_t | timeout | ||
| ) |
Enable FDCAN operation after FDCAN block has been set up.
This function will disable FDCAN configuration effectively allowing FDCAN to sync up with the bus. After calling this function it is not possible to reconfigure amount of filter rules, yet it is possible to configure rules themselves. FDCAN block operation state can be checked using fdcan_get_init_state.
- Parameters
-
[in] canport FDCAN block base address. See FDCAN block base addresses. [in] timeout Amount of empty busy loops, which routine should wait for FDCAN confirming that it left INIT mode. If set to 0, function will return immediately.
- Returns
- Operation error status. See FDCAN error return values.
- Note
- If this function returns with timeout, it usually means that FDCAN_clk is not set up properly.
Definition at line 154 of file fdcan.c.
References fdcan_cccr_init_cfg(), FDCAN_E_OK, and FDCAN_E_TIMEOUT.

◆ fdcan_transmit()
| int fdcan_transmit | ( | uint32_t | canport, |
| uint32_t | id, | ||
| bool | ext, | ||
| bool | rtr, | ||
| bool | fdcan_fmt, | ||
| bool | btr_switch, | ||
| uint8_t | length, | ||
| const uint8_t * | data | ||
| ) |
Transmit Message using FDCAN.
- Parameters
-
[in] canport CAN block register base. See FDCAN block base addresses. [in] id Message ID [in] ext Extended message ID [in] rtr Request transmit [in] fdcan_fmt Use FDCAN format [in] btr_switch Switch bitrate for data portion of frame [in] length Message payload length. Must be valid CAN or FDCAN frame length [in] data Message payload data
- Returns
- int 0, 1 or 2 on success and depending on which outgoing mailbox got selected. Otherwise returns error code. For error codes, see FDCAN error return values.
Definition at line 486 of file fdcan_common.c.
References fdcan_tx_buffer_element::data, fdcan_tx_buffer_element::evt_fmt_dlc_res, FDCAN_E_BUSY, FDCAN_E_INVALID, FDCAN_FIFO_BRS, FDCAN_FIFO_DLC_SHIFT, FDCAN_FIFO_EID_MASK, FDCAN_FIFO_EID_SHIFT, FDCAN_FIFO_FDF, FDCAN_FIFO_RTR, FDCAN_FIFO_SID_MASK, FDCAN_FIFO_SID_SHIFT, FDCAN_FIFO_XTD, fdcan_get_free_txbuf(), fdcan_get_txbuf_addr(), fdcan_length_to_dlc(), FDCAN_TXBAR, and fdcan_tx_buffer_element::identifier_flags.